Проект был разработан мной в 2025 году для решения актуальной проблемы — отсутствия парковочных мест во дворах жилых домов. Вечером, возвращаясь домой, водители сталкиваются с неопределенностью: есть ли смысл искать место во дворе или лучше сразу искать альтернативу.
Целью проекта стала разработка и внедрение системы автоматического мониторинга парковочных мест в режиме реального времени. Для сбора данных использовались видеокамеры компании «Уфанет», установленные с видом на придомовую территорию. На протяжении всего октября 2025 года, каждый час с 8:00 до 22:00, система делала снимки с этих камер, формируя обширный датасет. Этот набор данных, включающий изображения, снятые в разное время суток и при различных погодных условиях, был использован для обучения и последующей тонкой настройки модели на основе архитектуры YOLO (You Only Look Once).
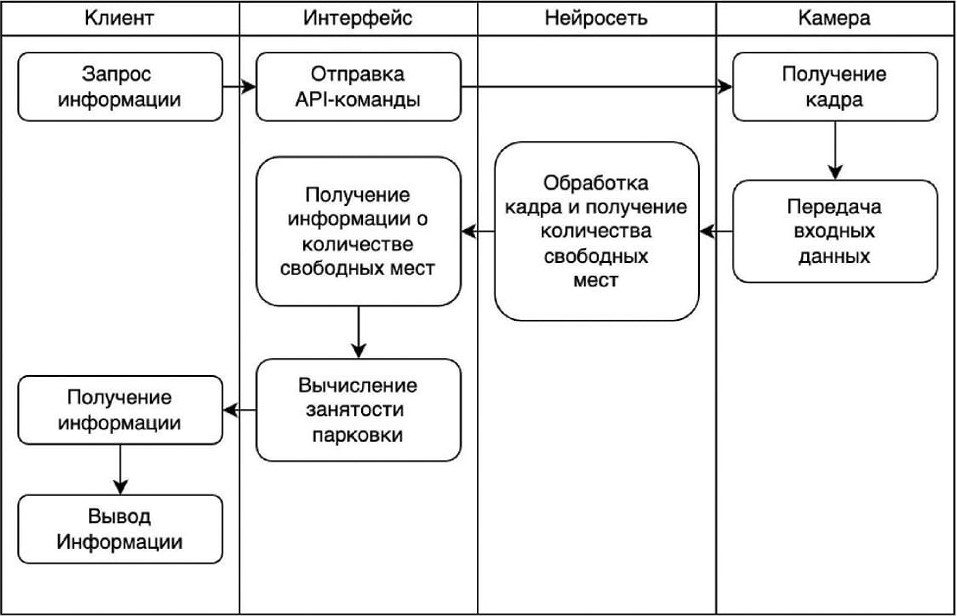
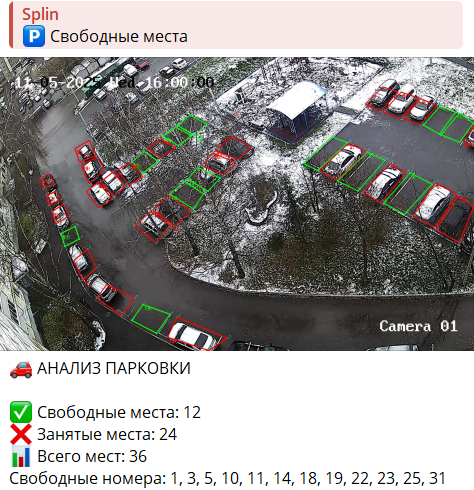
Для взаимодействия с пользователем был создан удобный Telegram-бот «Parky». При обращении пользователя бот отправляет запрос на сервер, который инициирует процесс анализа: получает текущий кадр с камеры, обрабатывает его с помощью обученной нейросетевой модели и определяет наличие транспортных средств в заранее размеченных зонах. Результат в виде обработанного изображения, где свободные места отмечены зеленым цветом, а занятые — красным, незамедлительно отправляется обратно пользователю.
Ключевой особенностью системы является не только детекция автомобилей, но и точное определение границ каждого парковочного места. Для этого была специально разработана вспомогательная desktop-программа с графическим интерфейсом. Эта программа позволяет оператору с высокой точностью вручную разметить парковочные зоны, очерчивая их полигонами с помощью четырёх точек. Для определения того, занято ли конкретное место, система использует метрику IoU (Intersection over Union), вычисляя степень пересечения bounding box’а обнаруженного автомобиля и контура парковочного места.